Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab


ABHINAV SINHA
Dr. Abhinav Sinha is an Assistant Professor in the Department of Aerospace Engineering and Engineering Mechanics at the University of Cincinnati, and is the director of the Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab. He works at the intersection of control theory, artificial intelligence, and dynamical systems. At the core of his research agenda is the development of control-theoretic foundations for networked autonomous multivehicle systems, with emphasis on safety, coordination, learning-enabled decision making, and robustness under uncertainty and operational constraints.
Prior to joining the University of Cincinnati, Dr. Abhinav Sinha was a postdoctoral researcher affiliated with the Unmanned Systems Lab at The University of Texas at San Antonio. His prior research experience includes a brief postdoctoral fellowship at the Intelligent Systems & Control Lab, Department of Aerospace Engineering, Indian Institute of Technology Bombay. Dr. Sinha also holds the distinction of completing his Ph.D. degree in Aerospace Engineering from the Indian Institute of Technology Bombay in around two years, setting a record for the fastest completion of a Ph.D. in the Department of Aerospace Engineering and one of the fastest in the institute. He is also a recipient of the prestigious Naik and Rastogi Award for excellence in Ph.D. research. Dr. Sinha is a senior member of IEEE (including Control Systems Society, Aerospace and Electronic Systems Society, and Robotics and Automation Society) and AIAA, and is a member of IFAC. He also serves as the vice chair for the IEEE CSS TC on Manufacturing, Automation, and Robotic Control.
Featured Works
Multicriteria Intercept Guidance and Control
Addressing terminal constraints on the trajectory of an autonomous vehicle in addition to the primary objective of target interception.
Learn more
Multiagent cooperative pursuit-evasion
The celebrated "the lady, the bandit, and the bodyguard" scenario. Our research offers a different viewpoint on this problem.
Learn more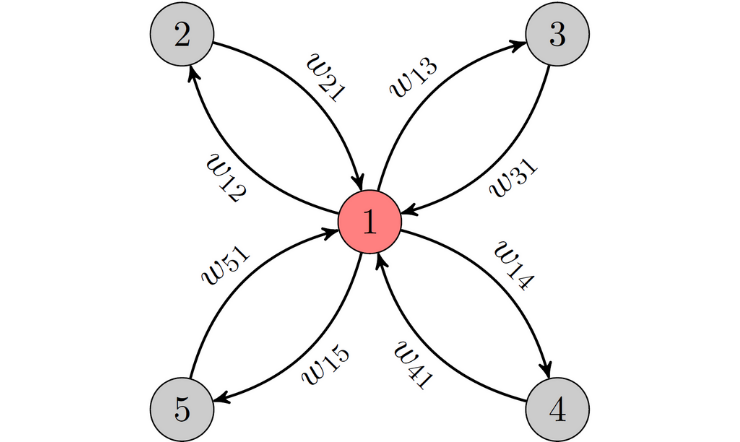
Resilience, Robustness, and Safety in Networked Systems
Building safe, resilient and robust networked cyber-physical systems to ensure fully distributed cooperative behavior.
Learn more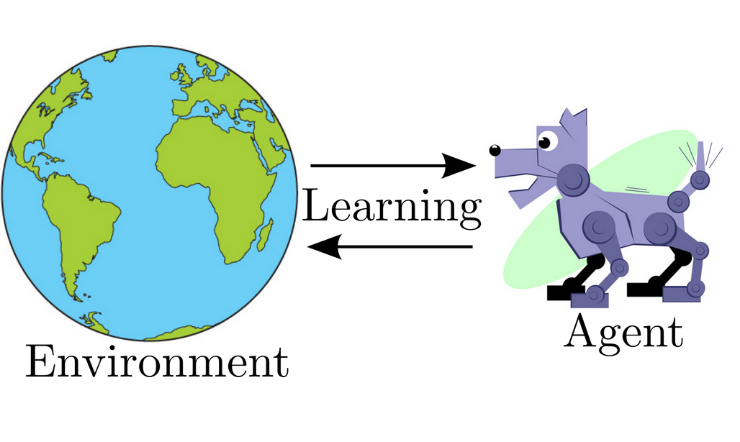
Learning and control in autonomous systems
Investigating fundamental aspects in learning and control for an autonomous system, with an emphasis on learning in complex large-scale interconnected systems.
Learn more
Multivehicle motion planning and control
Motion planning algorithms that handle uncertainties, adapt to dynamic environments, and maintain consistent performance under adverse conditions.
Learn more
High-fidelity Aerial Mobility and Manipulation
Unleashing the future of airborne mobility and precision manipulation, and redefining the boundaries of aerial possibilities.
Learn moreTeaching
-
AEEM 4042 (F 24, 25, S 26- )
Fundamentals of Control Theory
-
AEEM 5015C/5025C (every F and S)
UAV Design I/II

-
AEEM 9074 (Reading Course)
Introduction to Navigation and Guidance

-
AEEM 9074 (Reading Course)
Control of Networked Cyber-Physical Systems
-
AEEM 9074 (Reading Course)
Reinforcement learning and Data-driven Control
-
AEEM 2013 (S 2024)
Introduction to Systems Engineering
Joining the GALACxIS Lab
We are interested in working with self-motivated students and researchers who have a strong mathematical bent of mind, intellectual independence, and a genuine interest in developing rigorous control-theoretic foundations for autonomous systems. A strong fit with the lab includes curiosity, persistence, and enthusiasm for theoretically grounded problems with relevance to autonomous vehicles, learning-enabled decision-making, robotics, and networked cyber-physical systems.
Prospective Ph.D./M.S. Students
Prospective Ph.D. and M.S. students should apply through the appropriate university graduate admissions process and clearly indicate their interest in the GALACxIS Lab. Prospective Ph.D. applicants who have already submitted their application are welcome to email Dr. Sinha with a CV, unofficial transcript, brief statement of research interests, relevant technical background, and one or two GALACxIS research areas or publications that motivate their interest in the group. M.S. research opportunities depend on project availability, prior preparation, and fit with ongoing lab activities. Current or admitted M.S. students may contact Dr. Sinha with a CV, transcript, relevant coursework, technical skills, and a concise description of the research direction they hope to pursue.
Postdoctoral Researchers
Postdoctoral inquiries are welcome from exceptional candidates with a strong publication record and research expertise in control theory, autonomous systems, robotics, guidance and control, distributed systems, learning-enabled control, or closely related areas. Interested candidates should contact Dr. Sinha with a CV, publication list, brief summary of doctoral research, statement of future research interests, selected representative publications, and any relevant fellowship or funding opportunities, if applicable.
GALACxIS Lab Young Scholars Program
The GALACxIS Young Scholars Program is a high-school research outreach initiative designed to introduce motivated students to university-level research in robotics, autonomy, and control systems. Hosted by the GALACxIS Lab, the program provides age-appropriate, mentored exposure to feedback control, autonomous vehicles, robotic sensing, simulation, motion planning, and experimental validation. Through supervised laboratory activities, demonstrations, and project-based learning, students gain insight into how engineers design intelligent systems that perceive, decide, and act in uncertain environments. The program aims to inspire the next generation of engineers and researchers through a supportive, structured, and professionally supervised university research experience.
Current UC Students
Current UC graduate and undergraduate students interested in joining the lab should first review the lab's research areas and recent publications. Students should have a strong mathematical background, particularly in linear algebra, differential equations, signals and systems, and control. Prior exposure to graph theory, optimization, game theory, distributed algorithms, robotics, autonomous systems, or scientific programming would be especially helpful. Students who fit this profile are welcome to contact Dr. Sinha with a concise description of their interests, relevant coursework, technical background, and any prior research, simulation, or hardware experience. Due to the volume of inquiries, responses may be limited to students whose preparation and interests align with current lab opportunities.
To make your inquiry easier to evaluate, please keep your email concise and specific. A strong message should explain who you are, what opportunity you are seeking, why you are interested in the GALACxIS Lab, which research directions or publications are most relevant to your interests, and what technical background or skills you would bring to the group. Due to the number of inquiries received, not every message can receive an immediate response. Carefully prepared and focused emails are much easier to review.