Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab

Resilience, Robustness, and Safety in Networked Systems
Resilience, robustness, and safety are of paramount importance in autonomous and cyber-physical systems, where the reliable, secure, and constraint-aware operation of interconnected components is critical. Resilience refers to the system’s ability to withstand disturbances, failures, or attacks while maintaining essential functionality and recovering promptly to a desired operational state. It involves fault-tolerance mechanisms, adaptive control strategies, and dynamic reconfiguration techniques to ensure continuity of operation. Robustness, in the context of networked autonomous and cyber-physical systems, denotes the ability to perform reliably under varying conditions, including input uncertainties, environmental changes, modeling errors, and the presence of faulty or malicious components. Safety complements these notions by ensuring that system trajectories, decisions, and interactions remain within prescribed admissible limits, even in the presence of uncertainty and adverse operating conditions. Achieving these objectives often requires redundancy, error detection and correction, feedback control mechanisms, constraint-enforcing control architectures, and the ability to maintain or recover desired performance when faced with challenging scenarios.
Robustness of Consensus over Pseudo-undirected Graphs
In multiagent systems, some agents will have larger initial state values, while others may have smaller initial state values. The distributed leaderless framework with undirected graphs can only ensure a consensus value which is at the average of the agents' initial states. Sometimes, this may emerge as a restrictive requirement. One way to tackle this is to adopt a leader-follower scheme, and providing a wide range of arbitrary reference values to the leader. That said, the situation becomes over-dependent on a single agent. In either case, some agents do not affect the consensus value. We focus on a fully distributed cooperative behavior that also guarantees agreement at values which are not at the average of the agents' initial states. With the proposed nature of interaction, each agent has a stake in the consensus value. Physical constraints on actuators, such as bounded lateral acceleration of vehicles, are also respected when agents are connected over the proposed pseudo-undirected graph.
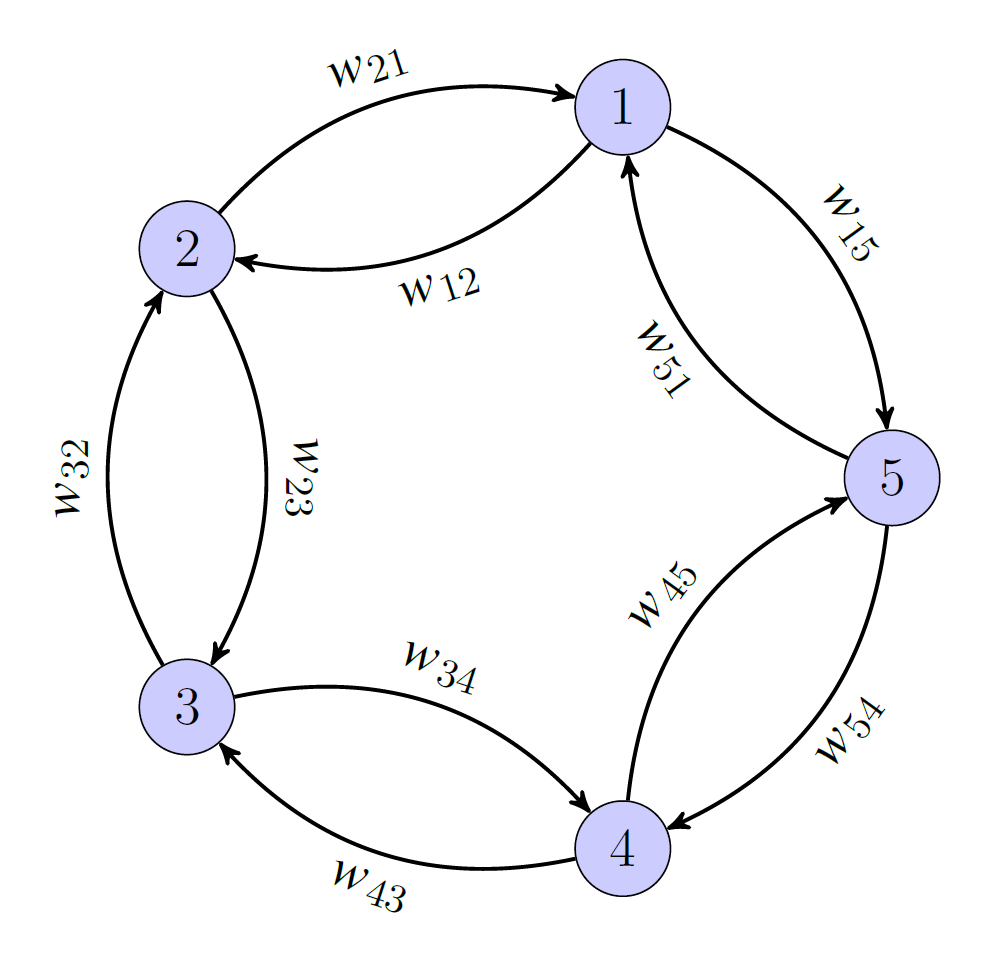
We also analyze the extent to which a single edge weight can be (negatively) perturbed without agents losing consensus. A direct application of this work can be seen in cooperative simultaneous interception of a target when the common time of interception is desired larger than the largest time-to-go in the swarm.
Selected Publications:
- Abhinav Sinha, Dwaipayan Mukherjee, and Shashi Ranjan Kumar, "Consensus-driven Deviated Pursuit for Guaranteed Simultaneous Interception of Moving Targets", IEEE Transactions on Aerospace and Electronic Systems, 61 (5), 12826-12838, 2025.
- Abhinav Sinha, Dwaipayan Mukherjee, and Shashi Ranjan Kumar, "On Robustness of Consensus over Pseudo-Undirected Path Graphs", Proceedings of the American Control Conference, New Orleans, Louisiana, USA, May 26-29, 2026, pp. 0-0.
- Abhinav Sinha, Dwaipayan Mukherjee, and Shashi Ranjan Kumar, "Deviated Pursuit based Cooperative Simultaneous Interception against Moving Targets", Proceedings of the American Control Conference, Denver, Colorado, USA, July 1-3, 2020, pp. 3796-3801.
Distributed Safe Consensus Under Input, State, and Output Constraints
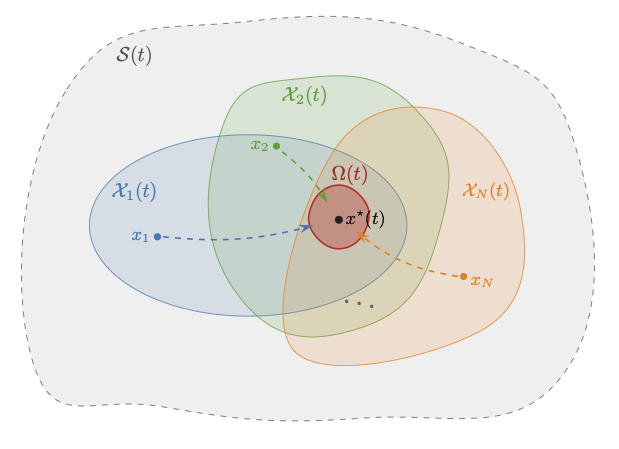
We develop a control-theoretic framework for distributed safe consensus of networked autonomous agents subject to simultaneous input, state, and output constraints. The motivating problem arises in multi-agent cyber-physical systems where agents must coordinate over a communication graph while respecting actuator limits, maintaining admissible internal behavior, and ensuring that measured or task-relevant outputs remain inside prescribed safety envelopes. The main theoretical contribution is a unified closed-loop analysis showing that, for compact admissible sets of initial conditions, the proposed controller simultaneously guarantees input admissibility, forward invariance of the prescribed state/output safe set, boundedness of all closed-loop signals, completeness of solutions, and asymptotic synchronization to a designer-selected admissible reference trajectory embedded within the agents' common safe set.
Selected Publications:
- Abhinav Sinha, and Shashi Ranjan Kumar, "Distributed Safe Consensus Under Asymmetric Input and Time-Varying Output Constraints", arXiv 2606.16116, 2026.
Time-Critical Distributed Unknown-Input Observation for Networked Autonomous Vehicles
Autonomous vehicle networks increasingly operate in time-critical environments in which state information must become reliable within a prescribed planning horizon rather than only asymptotically. This requirement arises in coordinated motion planning, distributed replanning, non-cooperative target tracking, and terminal guidance, where delayed convergence of state estimates can degrade path generation, collision-avoidance decisions, or interception performance. Motivated by these considerations, this research develops a predefined-time distributed unknown-input observer for leader-follower multi-agent systems over directed fixed and switching communication networks, where only a subset of followers has direct access to the leader state. The objective is to enable every follower to reconstruct the leader's state exactly within a user-prescribed time, independent of the initial estimation errors.
Selected Publications: