Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab

Multivehicle Motion Planning and Control
A reliable guidance system is of utmost importance for autonomous vehicles operating in diverse mobility scenarios, including path-following, target tracking, interception, formation flying, and obstacle avoidance. The development of such a system is vital due to its wide-ranging applicability and the high level of autonomy required. Our focus lies in designing an automated flight control system, which serves as a critical necessity in numerous significant applications. These applications include but are not limited to waypoint navigation, path-following, surveillance, localization, mapping, and autonomous landing. By emphasizing the design of an advanced flight control system, we aim to address the complex demands of these applications, ensuring optimal performance, precise navigation, and successful execution of tasks in various operational environments.
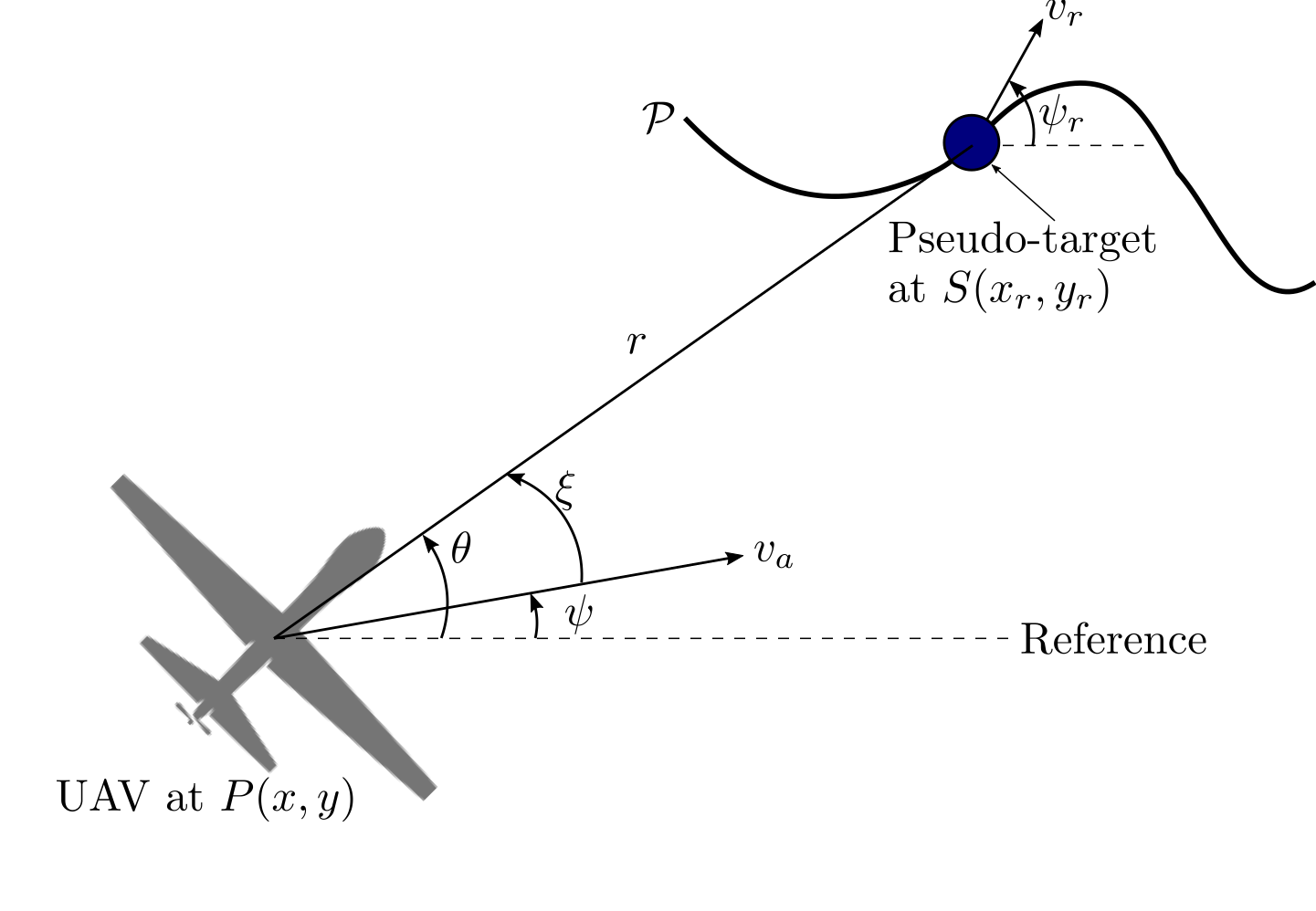
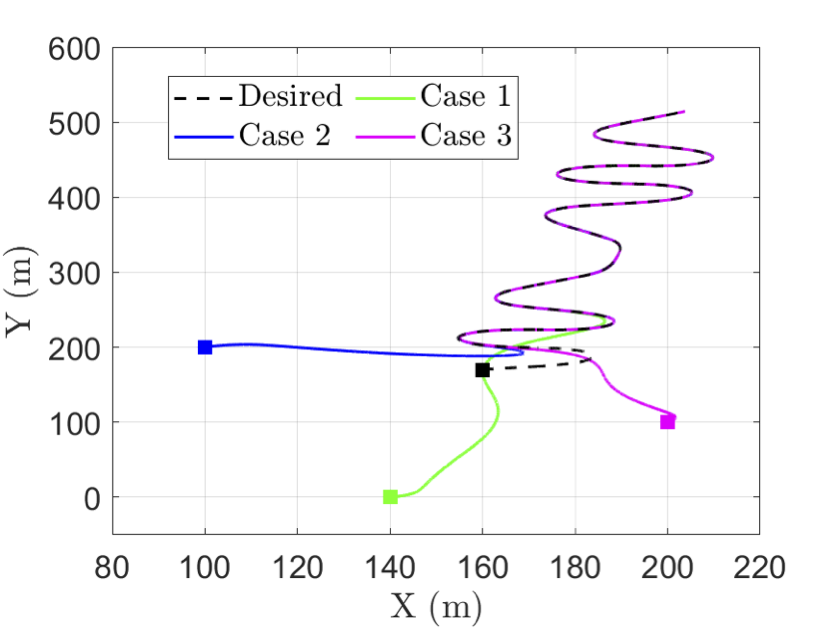
Guidance and Control for Autonomous Path-following
In a path-following problem, the control objective is to enable the autonomous vehicle to converge to and follow the desired path without needing any temporal constraints. In a way, this feature makes it more flexible than trajectory tracking or target capture scenarios where spatiotemporal constraints are accounted for. Specifically, for the path-following problem, we currently focus on developing a simple and robust path-following controller that enables an autonomous vehicle to follow the desired path without needing the information of the path's curvature.
Selected Publications:
- Saurabh Kumar, Shashi Ranjan Kumar, and Abhinav Sinha, "Three-dimensional Trajectory Tracking for Unmanned Aerial Vehicles Under Motion Constraints", AIAA Journal of Guidance, Control, and Dynamics, 49 (1), 78-96, 2026.
- Saurabh Kumar, Shashi Ranjan Kumar, and Abhinav Sinha, "Three-Dimensional Nonlinear Path-Following Guidance with Bounded Input Constraints", AIAA Journal of Guidance, Control, and Dynamics, 49 (1), 198-215, 2026.
- Saurabh Kumar, Shashi Ranjan Kumar, and Abhinav Sinha, "Three-Dimensional Path-Following Nonlinear Guidance for Unmanned Aerial Vehicles", AIAA Journal of Guidance, Control, and Dynamics, 47 (6), 1231-1240, 2024.
- Saurabh Kumar, Abhinav Sinha, and Shashi Ranjan Kumar, "Robust path-following guidance for an autonomous vehicle in the presence of wind", Aerospace Science and Technology, 150, 109225, 2024.
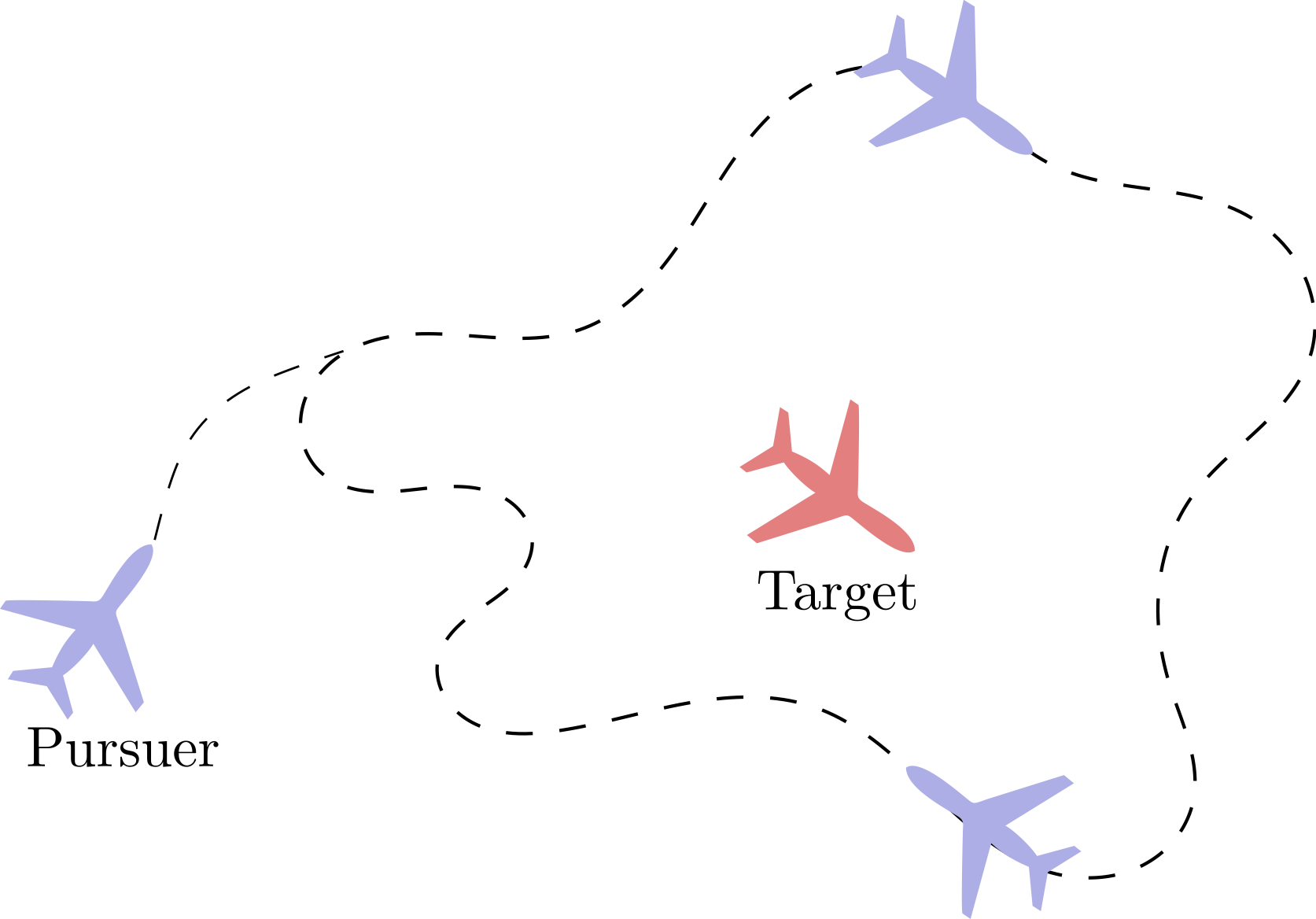
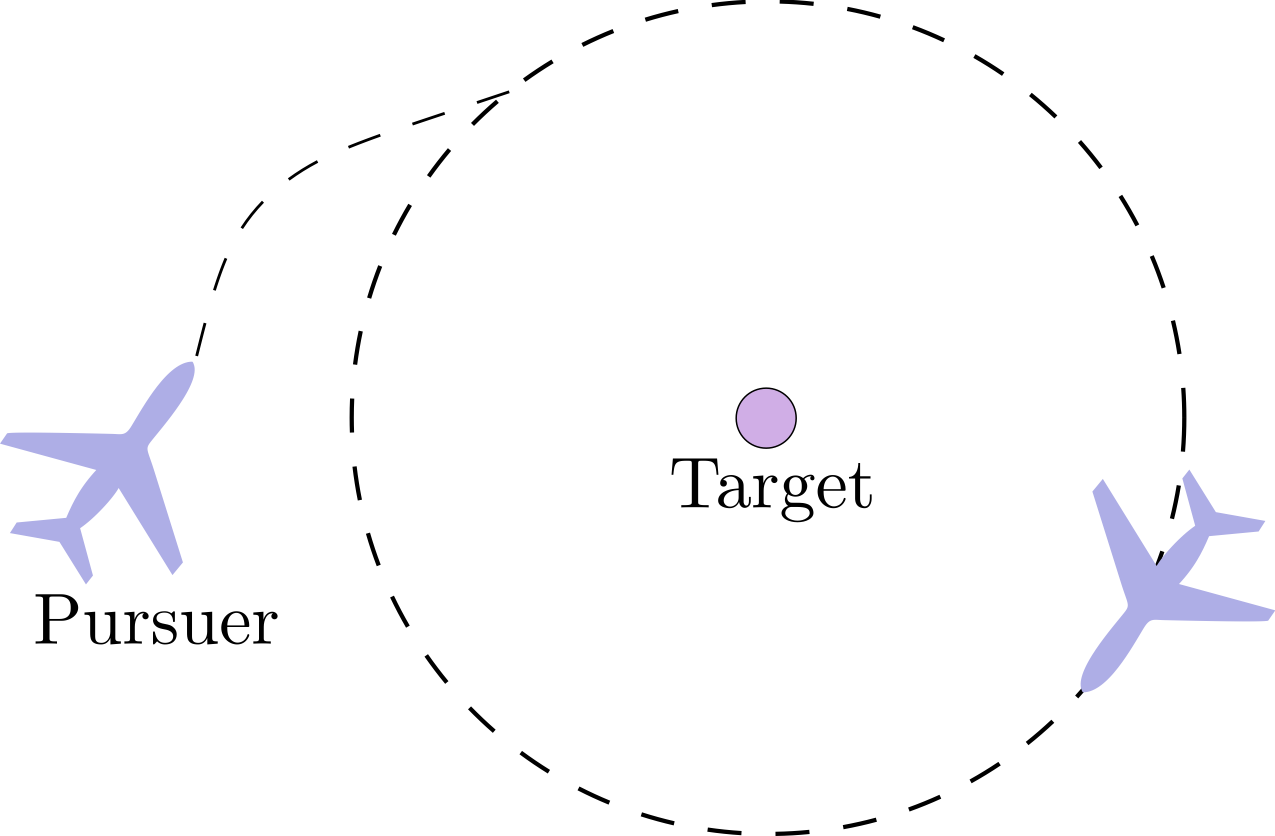
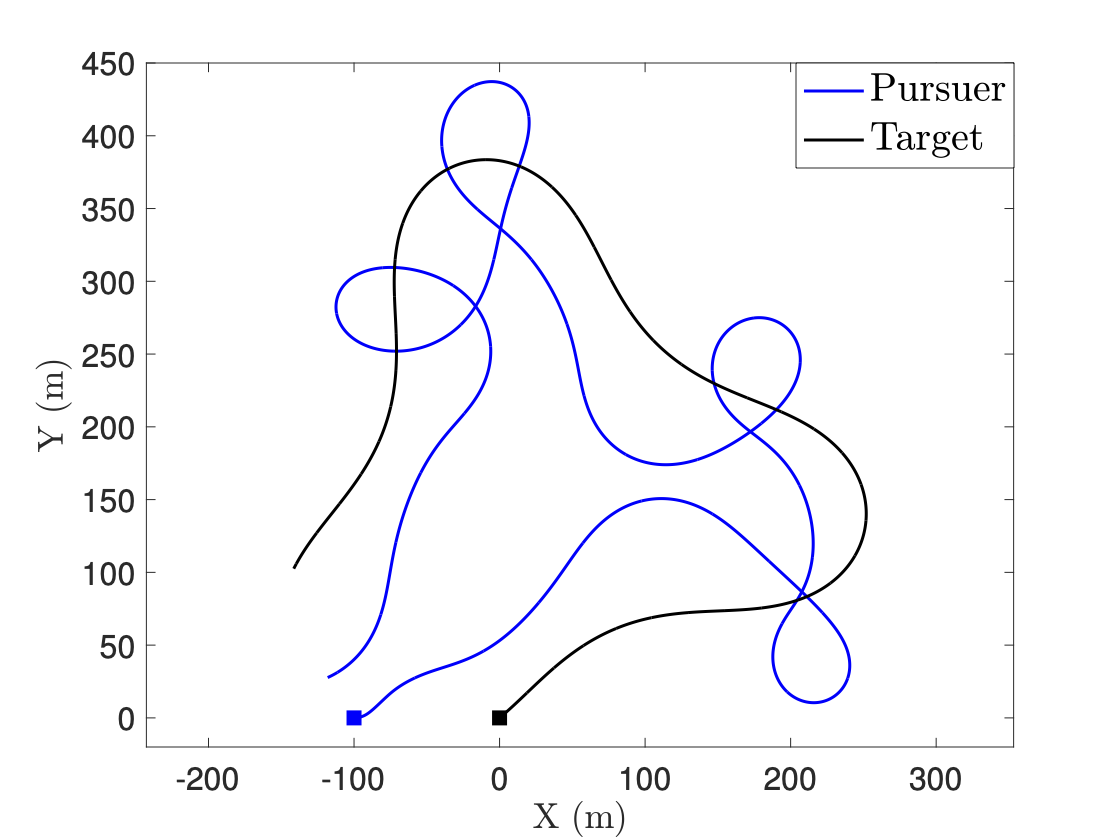
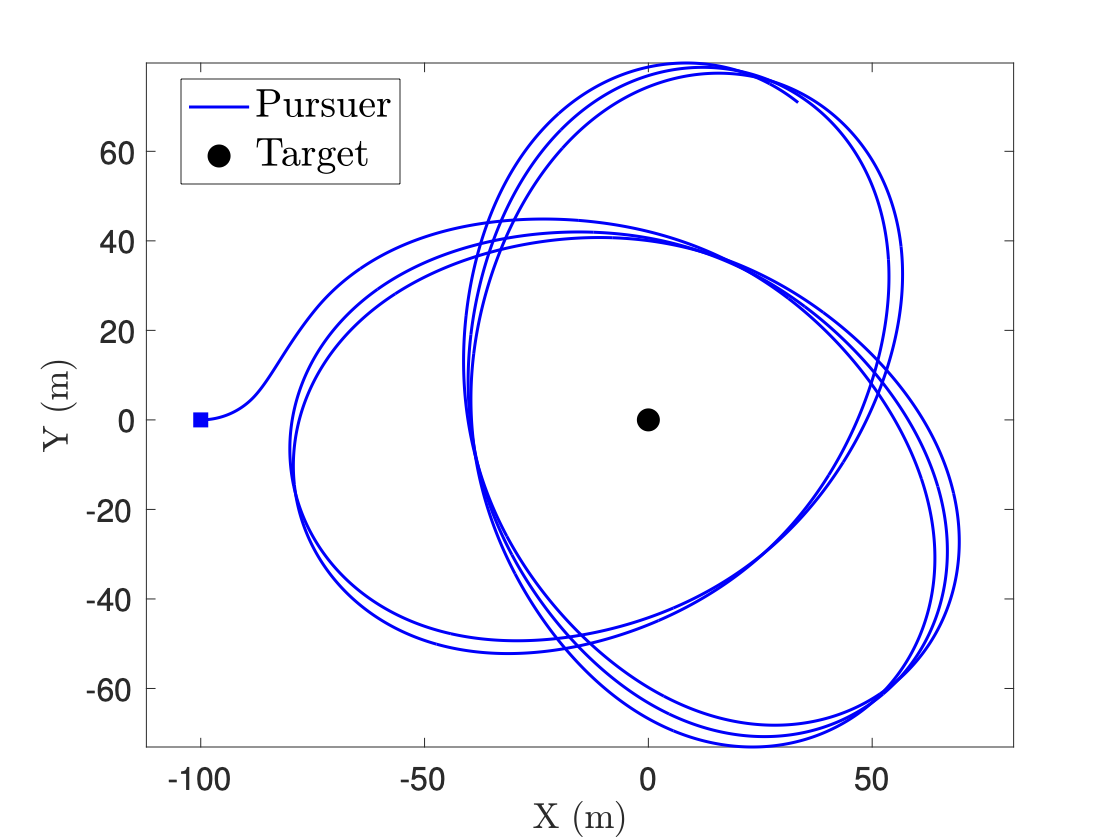
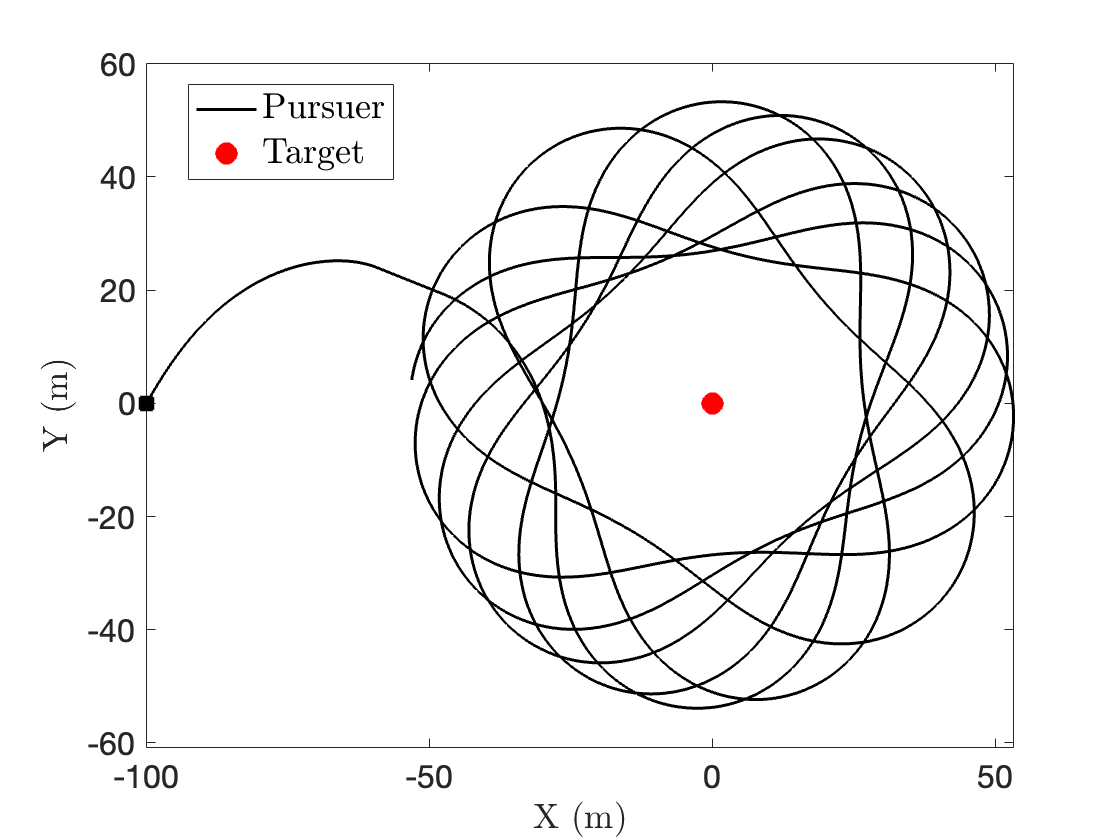
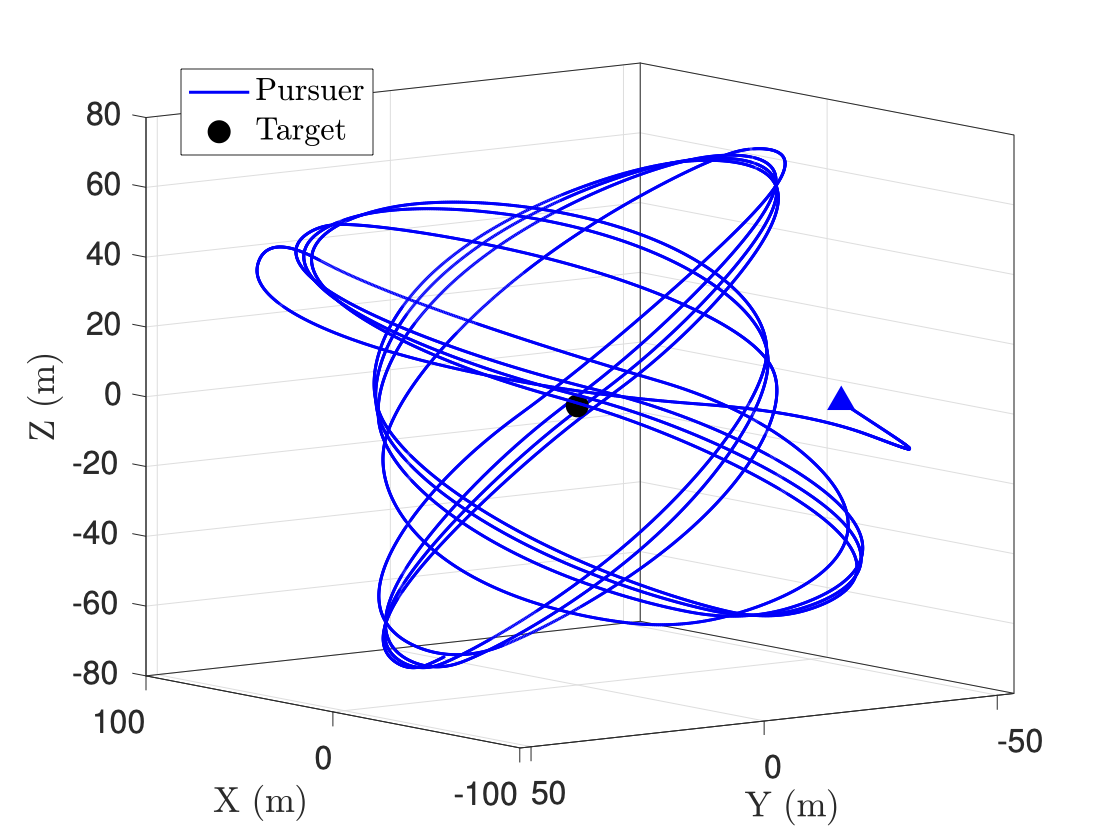
Target Enclosing Guidance
There are several situations where it is required for a vehicle (referred to as the "pursuer") to approach and maintain a specific shape or pattern around a region, object, or another vehicle (referred to as the "target"). This behavior is referred to as "target enclosing" and involves the pursuer orbiting the target while preserving the desired shape. One of the most commonly encountered types of target enclosing is circumnavigation or standoff tracking, where the pursuer keeps a fixed distance from the target by orbiting it. Instead of assuming a specific shape or geometry for the target, our research is focused on providing flexibility in enclosing targets of various shapes, sizes, and mobility. Our research addresses the challenges that include dealing with uncertainties in target motion, handling occlusions or sensor limitations, addressing control constraints, and ensuring robustness and stability of the enclosing behavior.
Selected Publications:
- Abhinav Sinha and Yongcan Cao, "Three-Dimensional Autonomous Guidance for Enclosing a Stationary Target Within Arbitrary Smooth Geometrical Shapes", IEEE Transactions on Aerospace and Electronic Systems, 56 (6), 9247-9256, 2023.
- Abhinav Sinha and Yongcan Cao, "Three-Dimensional Guidance Law for Target Enclosing Within Arbitrary Smooth Shapes", AIAA Journal of Guidance, Control, and Dynamics, 46 (11), 2224-2234, 2023.
- Abhinav Sinha and Yongcan Cao, "3-D Nonlinear Guidance Law for Target Circumnavigation", IEEE Control Systems Letters, 7, 655-660, 2023.
- Abhinav Sinha and Yongcan Cao, "Nonlinear Guidance Law for Target Enclosing with Arbitrary Smooth Shapes", AIAA Journal of Guidance, Control, and Dynamics, 45 (11), 2182-2192, 2022.
- Praveen Kumar Ranjan, Abhinav Sinha and Yongcan Cao, "Self-Organizing Multiagent Target Enclosing Under Limited Information and Safety Guarantees", IEEE Transactions on Aerospace and Electronic Systems, 61 (1), 1066-1078, 2024.
- Saurabh Kumar, Shashi Ranjan Kumar, and Abhinav Sinha, "Geometric Guidance for Enclosing Moving Targets", AIAA SciTech Forum, AIAA 2025-2233, 2025.
Relational Maneuvering for Flexible Formation
We present a novel formation strategy for a leader-follower unmanned aerial vehicle (UAV) system, drawing inspiration from the behavior of human pilots. In our approach, the formation geometry is not restricted to remain fixed as the vehicles maneuver. This means that the position and orientation of the follower UAV in relation to the leader UAV can change while adhering to certain constraints. Our strategy aims to maintain a desired fixed relative distance between the follower and leader UAVs, allowing for variations in their orientation. This flexibility in orientation helps reduce control effort for the follower UAV and offers tactical advantages. We term this approach as a "flexible relational maneuvering scheme" since the follower UAV is not constrained to a predetermined set of feasible positions, as is typical in close-proximity two-ship formations in air-to-air combat. Our approach seeks to replicate the behavior of human pilots in UAVs by implementing anticipatory maneuvers when the leader UAV executes aggressive turns.

Selected Publications:
- Praveen Kumar Ranjan, Abhinav Sinha, Yongcan Cao, "Three-dimensional Integrated Guidance and Control for Leader-Follower Flexible Formation of Fixed Wing UAVs ", arXiv 2510.06394, 2025.
- Praveen Kumar Ranjan, Abhinav Sinha, Yongcan Cao, Dzung Tran, David Casbeer, and Isaac Weintraub, "Energy-Efficient Ring Formation Control with Constrained Inputs ", AIAA Journal of Guidance, Control, and Dynamics, 46 (7), 1397-1407, 2023.
- Praveen Kumar Ranjan, Abhinav Sinha, Yongcan Cao, David Casbeer, and Isaac Weintraub, "Relational Maneuvering of Leader-Follower Unmanned Aerial Vehicles for Flexible Formation ", IEEE Transactions on Cybernetics, 24 (10), 5598-5609, 2024.
Coordinated Autonomy for Mobile Sensor–Effector Platforms
Autonomous systems of the future must do more than move through space. They must actively shape their geometry with respect to dynamic agents, uncertain environments, and mission objectives. This research develops the foundations for mobile robotic platforms that coordinate motion, sensing, and directed action as a unified autonomy problem. A unified treatment of vehicle guidance and payload orientation allows autonomous systems to preserve visibility, sustain purposeful spatial relationships, and adapt to agile motion. The broader vision is to advance coordinated geometry-aware autonomy in mobile sensor–effector platforms for persistent tracking, surveillance, protection, and cooperative operation in complex real-world environments.
Selected Publications:
- Shivam Bajpai, Abhinav Sinha, Isaac Weintraub, Rajnikant Sharma, and David Casbeer, "Nonlinear Guidance for a Pursuer-Turret Team for Maneuvering Target Engagement", Proceedings of the American Control Conference, New Orleans, Louisiana, USA, May 26-29, 2026, pp. 0-0.