Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab

Multicriteria Intercept Guidance and Control
Autonomous guidance encompasses the process of formulating a strategy by which an object is directed to maintain a specific trajectory, even when confronted with non-ideal circumstances. Within the realm of aerospace engineering, these non-idealities may arise due to a multitude of factors, including turbulent gusts of wind, navigational anomalies, unpredictable changes in weather conditions mid-flight, and more. In a broader sense, when discussing guidance, we typically consider the interplay between an object, acting as a pursuer or interceptor, and a distinct objective, which is also called a target or an evader. The primary aim is for the pursuer to steadily approach the intended target as time progresses. In order to achieve this, the pursuer must engage with and interpret information gleaned from its surroundings, subsequently making informed decisions. It is also worth noting that the target, in most cases, is not stationary. Rather, it frequently exhibits mobility, which induces different challenges during guidance design.
Intercept guidance involves a combination of complex calculations, sensor inputs, and control algorithms to guide the interceptor toward the target with high precision and efficiency. Typically, it also requires accounting for various factors such as target motion, environmental conditions, interceptor capabilities, and engagement constraints. A high-level overview of intercept guidance incorporates:
- Target Acquisition
- Engagement Planning
- Navigation/Control
- Midcourse Corrections
- Terminal Guidance
Applications like aerial refueling, docking, waypoint and collision-free navigation, landing, and target capture often place terminal constraints on the trajectory of the vehicle in addition to the primary objective of guidance. The recent successful landing of the reusable rockets can be seen as one such application where the terminal constraint on the attitude of the rocket was critical for a successful landing. In particular, our research develops terminal guidance and control strategies for an interceptor to capture a target (whose defensive capabilities are either manifested through enhanced structural integrity or agility in its motion) by exploiting target vulnerabilities like radar deception and structural constraints. Our work considers various types of constraints in different interceptor-target engagements for strategic trajectory shaping, while accounting for imperfect measurements, aerodynamic parameter variations, and the effects of autopilot performance on mission success.
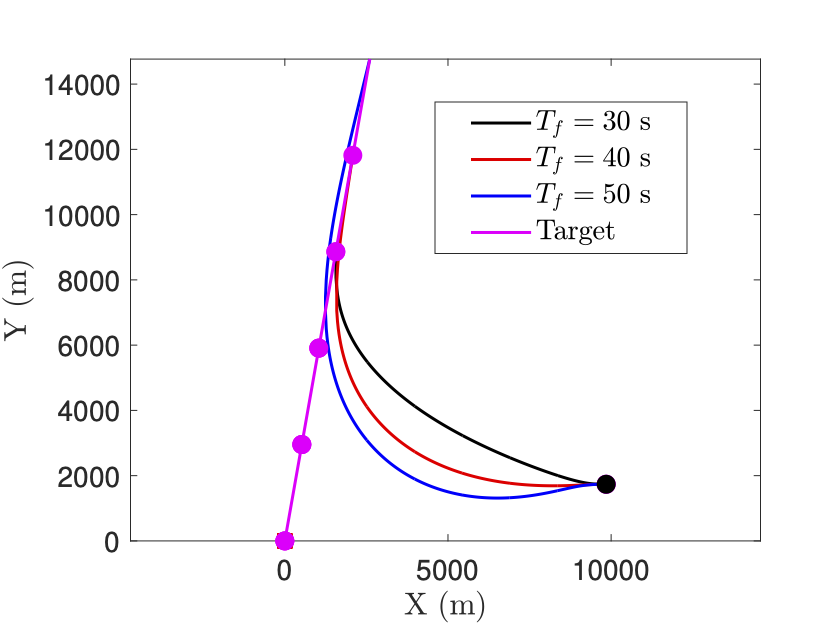
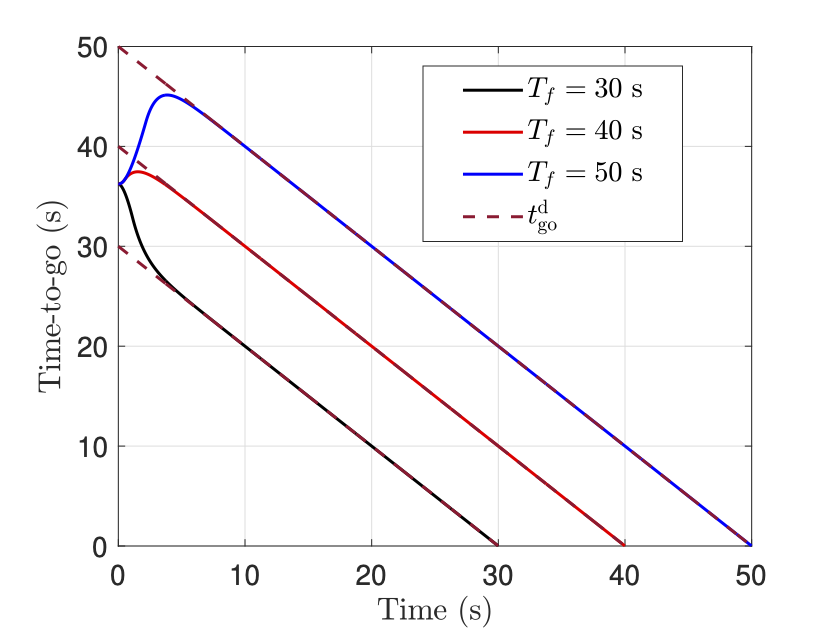
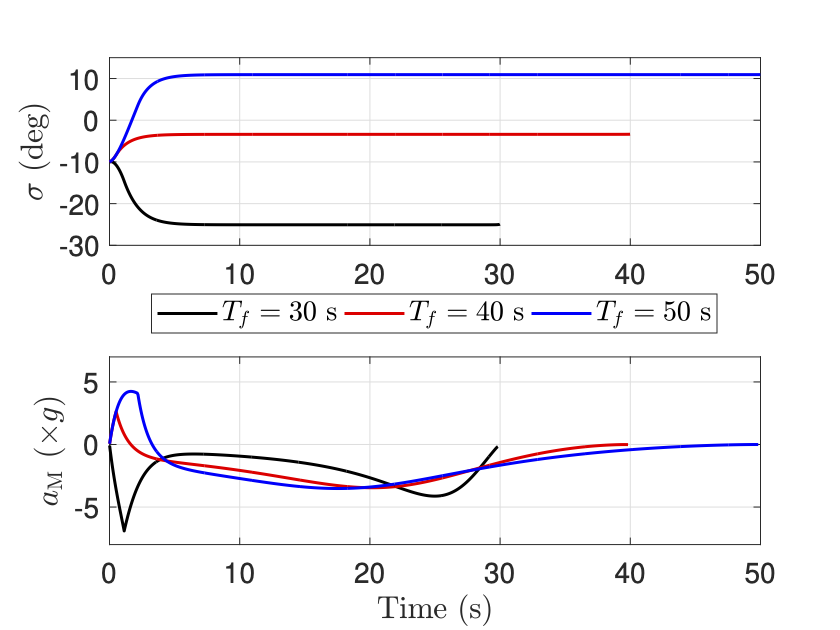
Terminal (Impact) Time Constrained Guidance and Control for One-to-One Engagements
One-to-one impact time guidance plays a crucial role in scenarios where precision, timing, and synchronization are paramount. By aligning the pursuer's trajectory with the target's path at a specific moment, our approach enhances the chances of a successful interception, reduces collateral damage, and maximizes mission effectiveness in time-sensitive operations. Our approach also enables accurate positioning, compensates for target evasion, and maximizes efficiency in both planar and three-dimensional engagements.
Selected Publications:
- Abhinav Sinha, Rohit V. Nanavati, and Shashi Ranjan Kumar, "Three-dimensional Nonlinear Impact Time Guidance using Predicted Interception Point", AIAA Journal of Guidance, Control, and Dynamics, 36 (3), 608-617, 2023.
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Three-Dimensional Guidance with Terminal Time Constraints for Wide Launch Envelops", AIAA Journal of Guidance, Control, and Dynamics, 44 (2), 343-359, 2021.
Cooperative Time Constrained (Salvo) Guidance and Control for Many-to-One Engagements
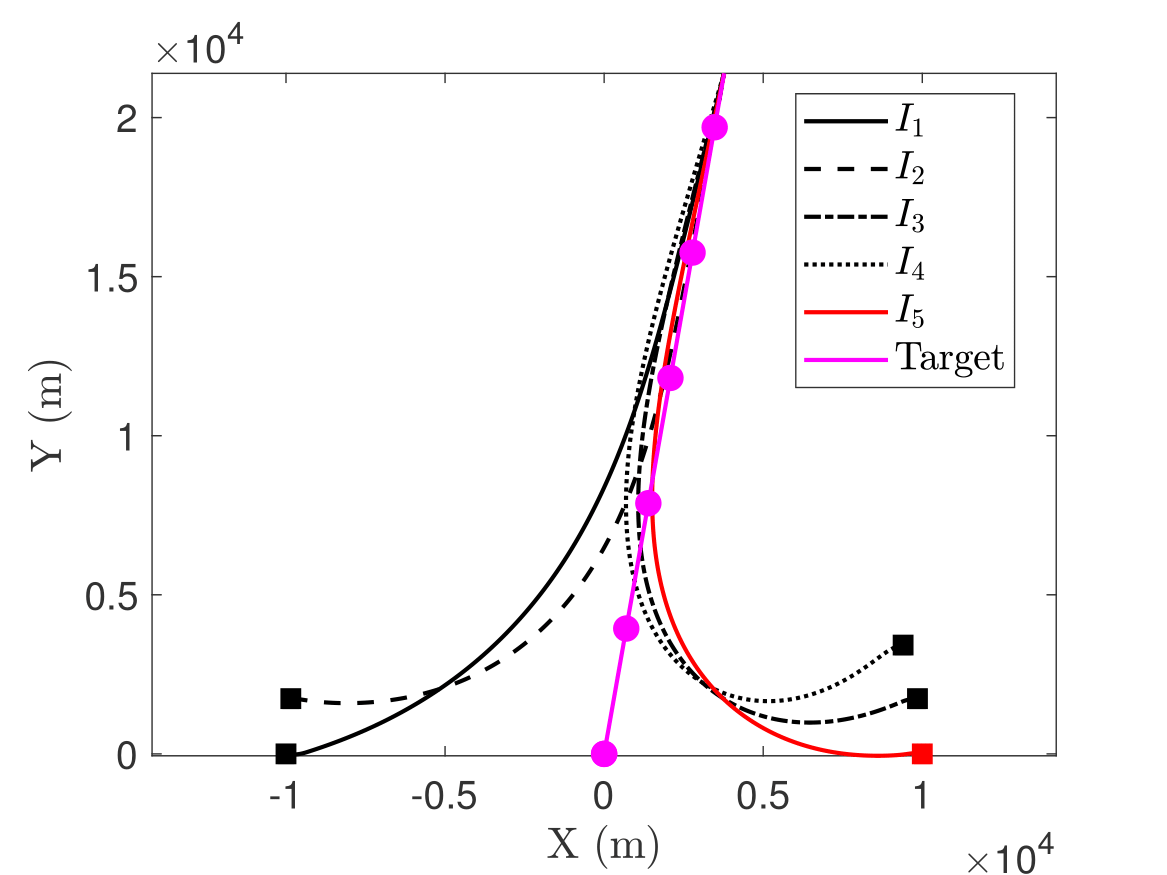
Our research addresses the problem of having a coordinated simultaneous target interception under various terminal and in-flight constraints. One-to-one engagements require individual control over the interception time for each interceptor, potentially necessitating pre-programmed impact times prior to launch. In such cases, communication among interceptors is typically absent, resulting in an open-loop system that may prove inefficient in ensuring simultaneous target capture. To address these limitations, our research has increasingly focused on cooperative guidance strategies capable of guaranteeing salvo behavior by precisely controlling the times of interception. The proposed cooperative strategies aim to synchronize the actions of multiple interceptors, enabling them to act in unison and effectively coordinate their time of interception. By synchronizing their interception times, the interceptors can exploit vulnerabilities of the adversary and maximize the probability of target interception.
Selected Publications:
- Abhinav Sinha, and Shashi Ranjan Kumar, "Cooperative Target Interception in 3-D Engagements Over Switched Dynamic Graphs", IEEE Transactions on Aerospace and Electronic Systems, 62, 4181-4192, 2026.
- Abhinav Sinha and Shashi Ranjan Kumar, "Cooperative Target Capture using Predefined-time Consensus over Fixed and Switching Networks", Aerospace Science and Technology, 127, 107686, 2022.
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Three-Dimensional Nonlinear Cooperative Salvo using Event-Triggered Strategy", AIAA Journal of Guidance, Control, and Dynamics, 44 (2), 328-342, 2021.
- Abhinav Sinha, Dwaipayan Mukherjee, and Shashi Ranjan Kumar, "Deviated Pursuit based Cooperative Simultaneous Interception against Moving Targets", Proceedings of the American Control Conference, Denver, Colorado, USA, July 1-3, 2020, pp. 3796-3801.
- Abhinav Sinha and Shashi Ranjan Kumar, "Super-Twisting Control Based Cooperative Salvo Guidance using Leader-Follower Approach", IEEE Transactions on Aerospace and Electronic Systems, 56 (5), 3556-3565, 2020.
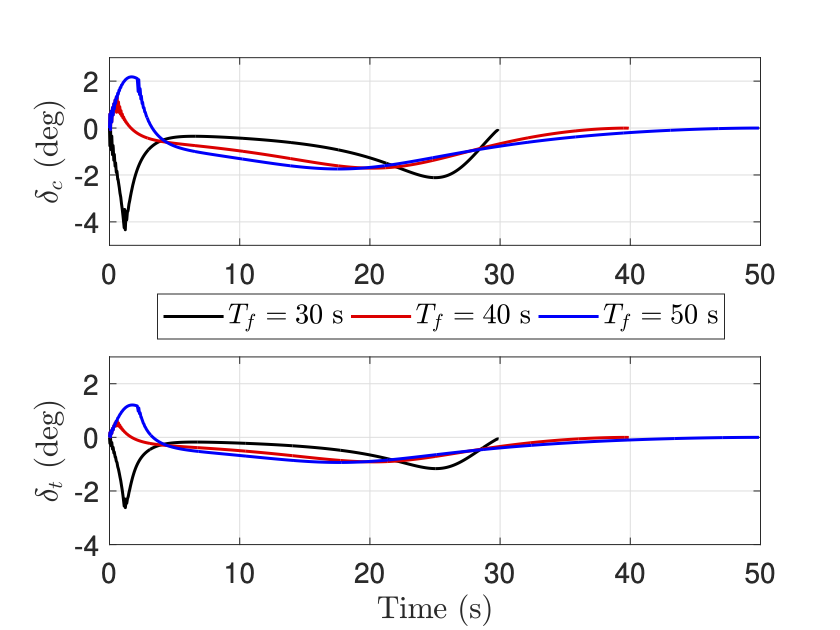
Integrated Guidance and Control with Terminal Constraints
Traditionally, the design of guidance strategies focused primarily on the kinematics of the engagement between the interceptor and the target, disregarding the dynamics of the interceptor itself. These designs operated under the assumption that the interceptor could instantaneously achieve the desired acceleration. However, in unexpected flight conditions, relying on an idealized response of the control loop dynamics could lead to the deterioration of such designs, as previous studies have highlighted. Therefore, it is pragmatic and practical to consider the interceptor's dynamics when designing efficient and implementable guidance strategies, especially when there are constraints on its trajectory. Moreover, integrating separate guidance and control loops into a cohesive single loop, which directly generates the fin deflections, can significantly enhance the endgame performance of the homing interceptor, and allow better adaptation to varying flight conditions.
Selected Publications:
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Cooperative Integrated Guidance and Control Design for Simultaneous Interception", Aerospace Science and Technology, 120, 107262, 2022.
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Impact Time Constrained Integrated Guidance and Control Design", Aerospace Science and Technology, 115, 106824, 2021.
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Nonsingular Impact Time Guidance and Control using Deviated Pursuit", Aerospace Science and Technology, 115, 106776, 2021.
- Abhinav Sinha and Shashi Ranjan Kumar, "Nonsingular Impact Time Guidance and Control Co-design against a Stationary Target", Proceedings of the AIAA Guidance, Navigation and Control Conference, National Harbor, MD, USA, 2023.
- Abhinav Sinha, Rohit V. Nanavati, and Shashi Ranjan Kumar, "Impact Angle Constrained Integrated Guidance and Control for a Dual-controlled Interceptor", Proceedings of the Indian Control Conference, Mumbai, India, December 20-22, 2021, pp. 27-32.
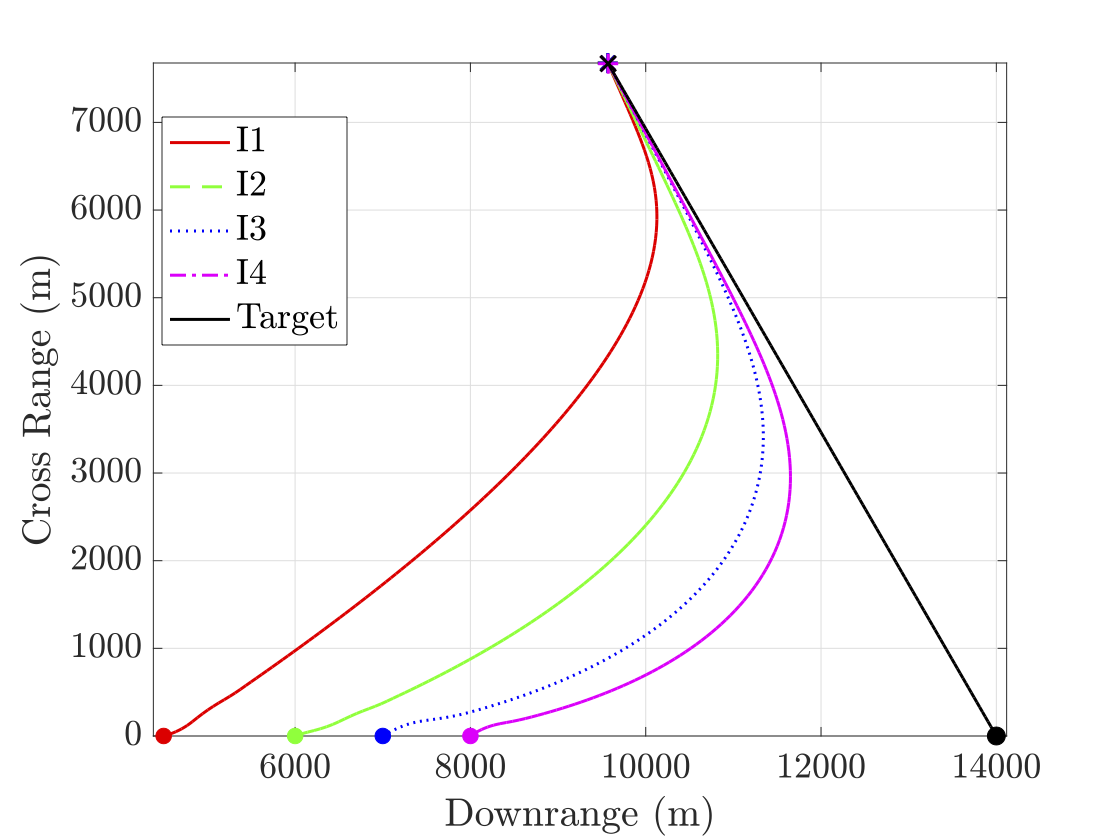
One-Shot Cooperative Estimation, Guidance, and Control for Seeker-Limited Interceptors
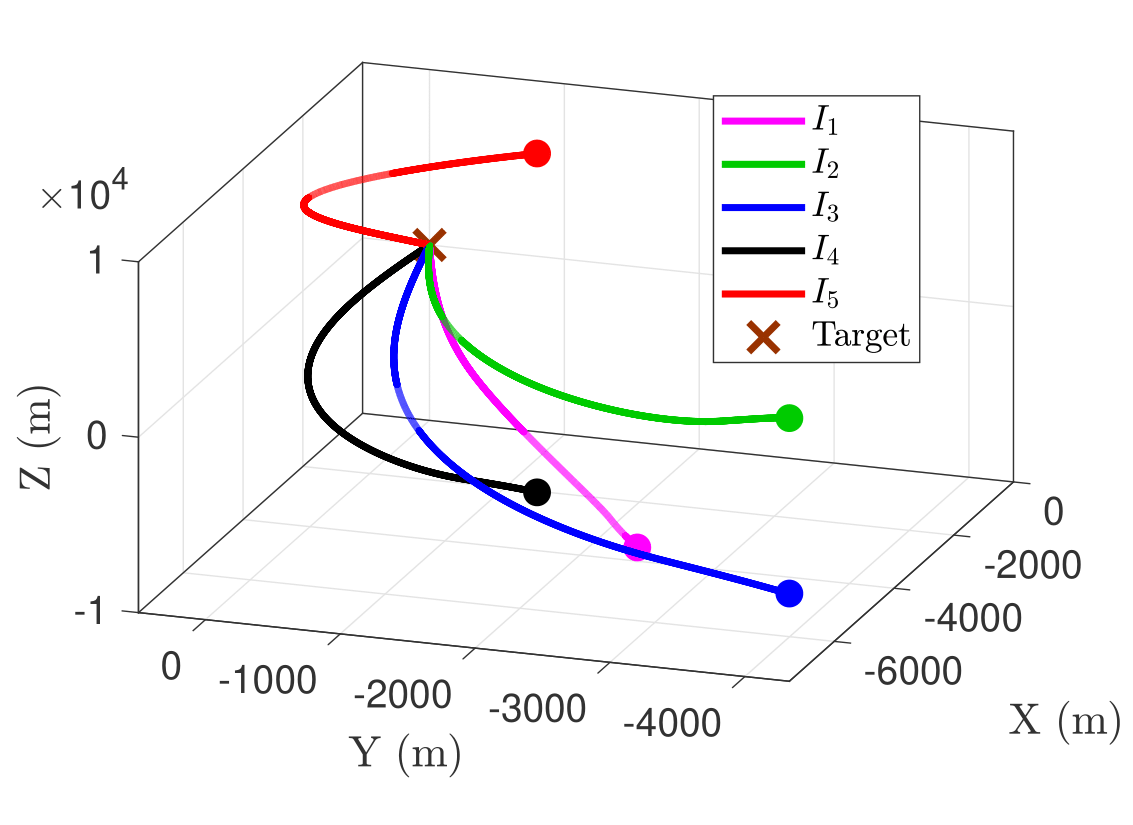
Cooperative salvo guidance strategies typically require full information about the target to synchronize their impact time values. From an autonomy-oriented systems design perspective, equipping all interceptors with onboard seekers is often infeasible in large-scale engagements due to constraints on cost, weight, and energy consumption. A scalable and autonomous architecture delegates sensing capabilities to a subset of agents, while the remaining interceptors operate seeker-less by autonomously estimating target states through distributed information fusion and local coordination. This enables decentralized decision-making and synchronized time-constrained interception without full sensing redundancy. Building on these considerations, this work investigates a cooperative salvo guidance scenario characterized by heterogeneous access to target state information, where only a subset of interceptors possess onboard sensing capabilities. The remaining agents employ a distributed observer to estimate the necessary relative engagement variables to facilitate cooperative salvo despite sensing asymmetries.
Selected Publications:
- Lohitvel Gopikannan, Shashi Ranjan Kumar, and Abhinav Sinha, "Predefined-time One-Shot Cooperative Estimation, Guidance, and Control for Simultaneous Target Interception", arXiv 2601.07744, 2026.
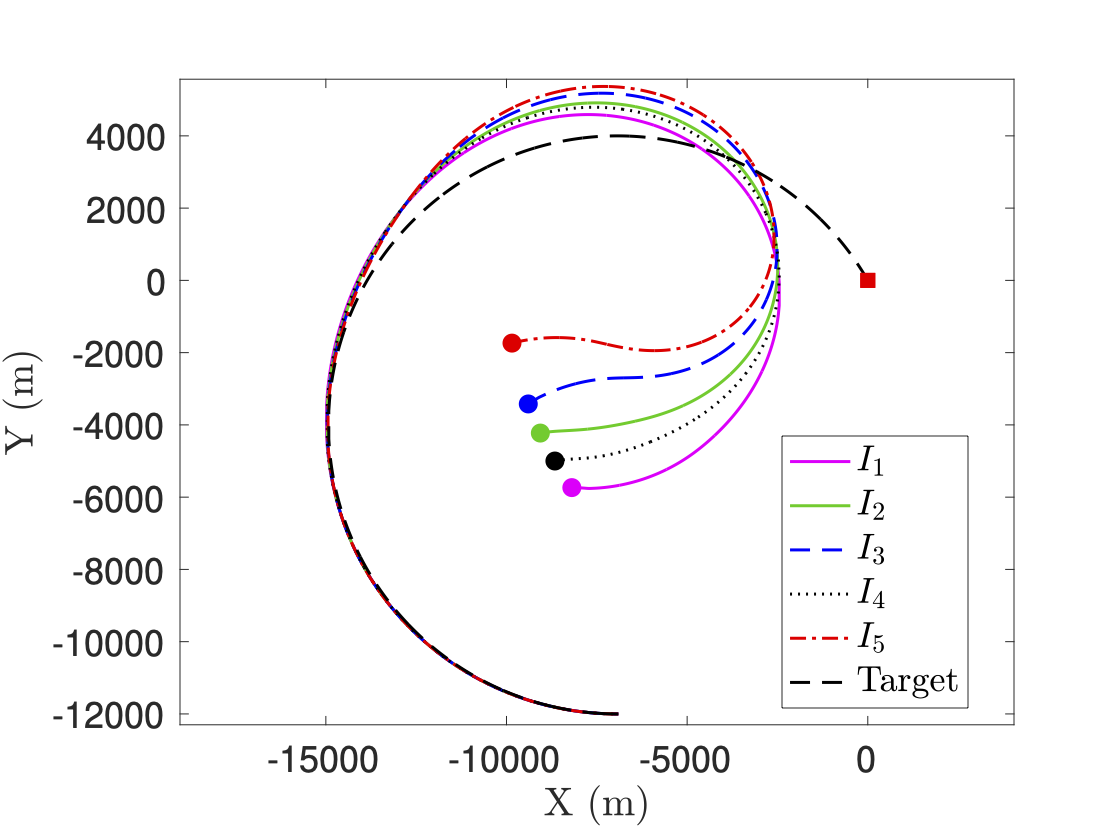
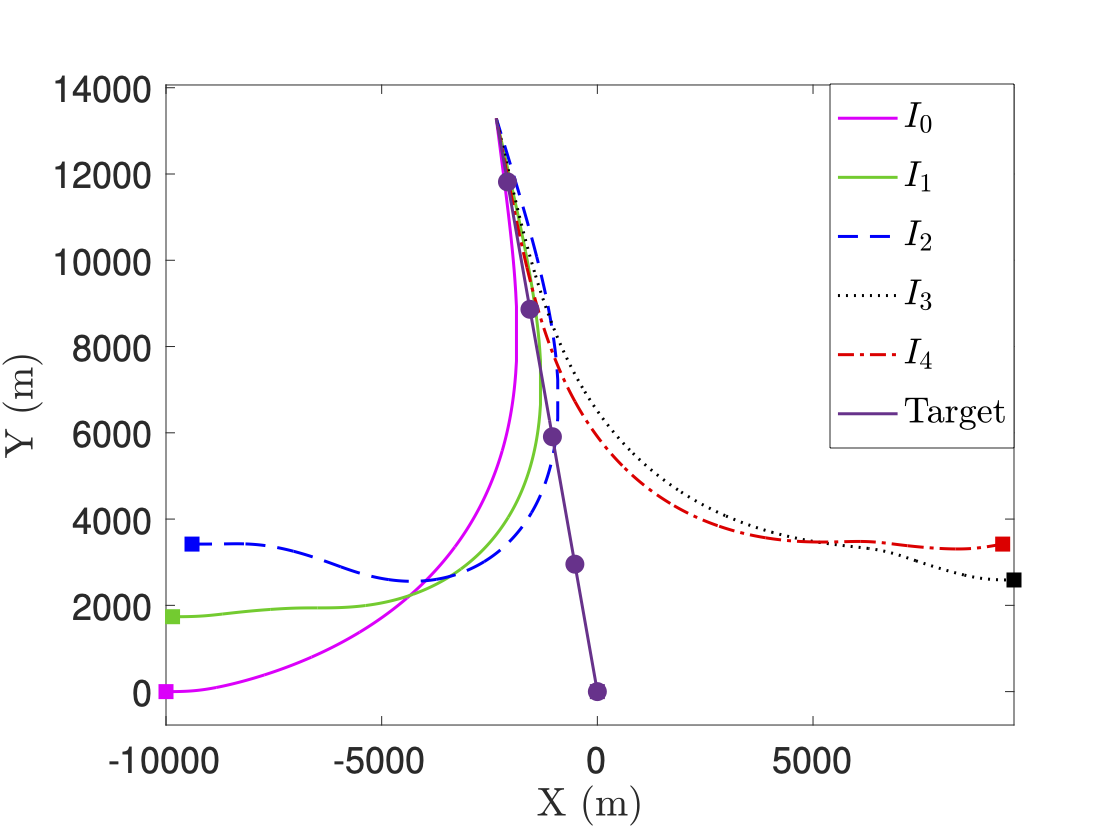
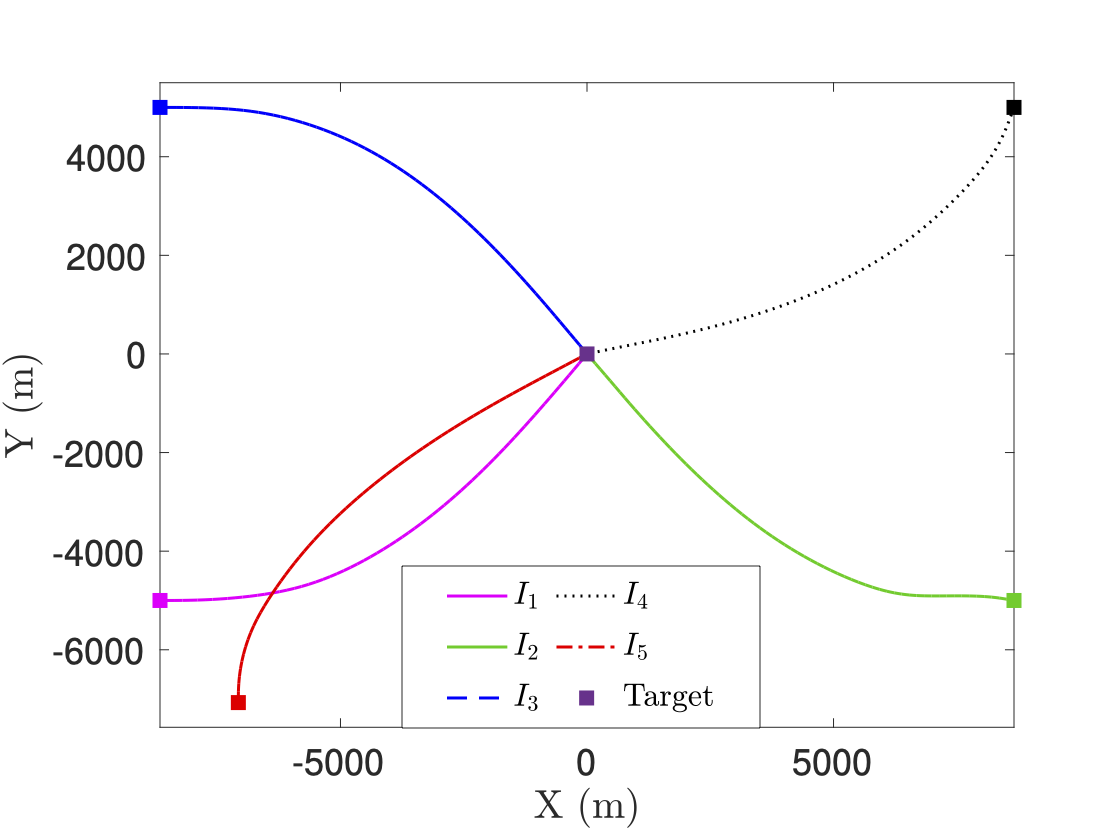
Encryption in the Trajectory Domain
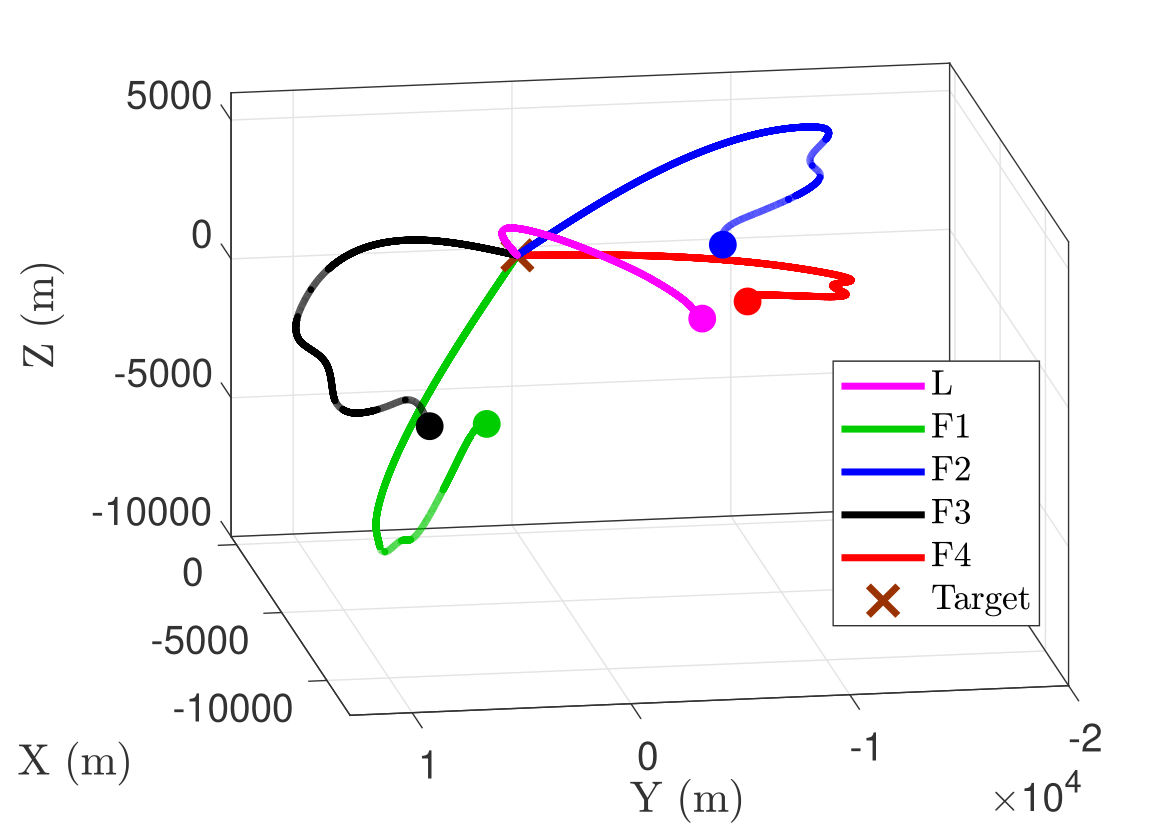
We introduce the concept of trajectory encryption in cooperative simultaneous target interception, wherein heterogeneity in guidance principles across a team of agents is leveraged as a strategic design feature. By employing a mix of heterogeneous time-to-go formulations leading to a cooperative guidance strategy, the swarm of vehicles is able to generate diverse trajectory families. This diversity expands the feasible solution space for simultaneous target interception, enhances robustness under disturbances, and enables flexible time-to-go adjustments without predictable detouring. From an adversarial perspective, heterogeneity obscures the collective interception intent by preventing straightforward prediction of swarm dynamics, effectively acting as an encryption layer in the trajectory domain. The proposed solution is flexible enough to allow morphing of the guidance commands during the engagement if the vehicles can issue commands following different guidance principles to dynamically switch or blend between them in real time. Therefore, the proposed strategy renders the choice of guidance law as a tunable degree of freedom by augmenting trajectory diversity beyond static heterogeneity to ensure adaptability in contested environments.
Selected Publications:
- Lohitvel Gopikannan, Shashi Ranjan Kumar, and Abhinav Sinha, "Trajectory Encryption Cooperative Salvo Guidance", Proceedings of the American Control Conference, New Orleans, Louisiana, USA, May 26-29, 2026, pp. 0-0.