Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab

Multiagent Cooperative Pursuit-Evasion
The context of multiagent pursuit-evasion is an important aspect in robotics, aerospace and control engineering, and path planning. In multi-vehicle pursuit-evasion scenarios, the pursuer (incoming threat to the evader) tries to minimize its relative distance with respect to the evader (targeted vehicle). On the other hand, the evader attempts to throw the pursuer off its trail and deploys a defending interceptor (defender) to assist in avoiding possible capture by the pursuer. The evader, therefore, cooperates with the defender, which attempts to neutralize the pursuer, before the pursuer can capture the evader. In this regard, the evader and the defender are a cooperating team, while the pursuer is in the opposition.
The resulting three-player engagement scenarios are different from the the traditional one-to-one engagements, and present a formidable challenge in the design of defense strategy, as the evader-defender team may use different levels of cooperation to neutralize the threat.
Time-Constrained Cooperative Pursuit-Evasion
We consider a pursuit-evasion scenario among three agents- an evader, a pursuer, and a defender. We design cooperative guidance laws for the evader and the defender team to safeguard the evader from an attacking pursuer. Unlike differential games, optimal control formulations, and other heuristic methods, we propose a novel perspective on designing effective nonlinear feedback control laws for the evader-defender team using a time-constrained guidance approach.
Selected Publications:
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Three-agent Time-constrained Cooperative Pursuit-Evasion", Journal of Intelligent & Robotic Systems, 104 (28), 1-27, 2022.
- Shivam Bajpai, Abhinav Sinha, and Shashi Ranjan Kumar, "Cooperative Guidance for Aerial Defense in Multiagent Systems", IEEE Transactions on Aerospace and Electronic Systems, 62, 3700-3710, 2025.
Scalable Solutions to the Target Defense Scenario
We consider a pursuit-evasion scenario where a pursuer is aiming to capture an evader, but the evader is assisted by multiple defenders to avoid getting captured. The objective is to design cooperative guidance and control strategies for the evader and the defender swarm to safeguard the former. A part of our research proposes an impact-time control based cooperative guidance approach to defend the evader from the pursuer. If the defenders intercept the pursuer before the latter gets a chance to come in the vicinity of the evader, the mission can be deemed a success. The evader-defender team can use various levels of cooperation to achieve this objective, depending on the availability of communication resources and desired simplicity during the implementation.

Selected Publications:
- Abhinav Sinha, Shashi Ranjan Kumar, and Dwaipayan Mukherjee, "Cooperative Salvo Based Active Aircraft Defense using Impact Time Guidance", IEEE Control Systems Letters, 5 (5), 1573-1578, 2021.
Pursuit in an Adversarial Environment
We consider a pursuit-evasion scenario among three agents- an evader, a pursuer, and a defender. This pursuit-evasion game involves strategic maneuvering, where the pursuer must navigate through various obstacles and overcome the defenses set up by the defender to accomplish its objective. The presence of a defender adds an extra layer of complexity and challenge to the pursuit, as the defender employs tactics to thwart the pursuer's advances and safeguard the target. We focus on designing guidance strategies for the pursuer to capture the target while evading one or more defenders.
Selected Publications:
- Praveen Kumar Ranjan, Abhinav Sinha, and Yongcan Cao, "Engagement-Zone-Aware Input-Constrained Guidance for Safe Target Interception in Contested Environments", arXiv 2603.23649, 2026.
- Praveen Kumar Ranjan, Abhinav Sinha, and Yongcan Cao, "Safety-Critical Input-Constrained Nonlinear Intercept Guidance in Multiple Engagement Zones", Proceedings of the American Control Conference, New Orleans, Louisiana, USA, May 26-29, 2026, pp. 0-0.
- Suraj Bandela, Abhinav Sinha, and Yongcan Cao, "A Reinforcement Learning Approach to Target Capture in the Presence of a Defender", AIAA SciTech Forum, AIAA-2025-1902, pp. 1-14, 2025.
Cooperative Guidance and Geometrical Solutions to the Target Defense Problem
We investigate geometrical approaches to guarantee pursuit-evasion from arbitrary three-body engagement geometries. The proposed solution, which is the evader-defender cooperative guidance strategy, is aimed at ensuring that the defender always arrives at a certain angle within a prescribed time, regardless of the initial geometry, thereby preventing the pursuer from capturing the evader. Our solutions are expected to be less stringent and allow the defender to have more flexibility in terms of geometry and maneuvers depending on engagement scenarios. By analyzing the geometry of the problem, our research open up new avenues to identify necessary and sufficient conditions or configurations that lead to successful evasion or capture.
Selected Publications:
- Saurabh Kumar, Shashi Ranjan Kumar, and Abhinav Sinha, "Cooperative Nonlinear Guidance Strategies for Guaranteed Pursuit-Evasion", arXiv:2402.06176, 2024.
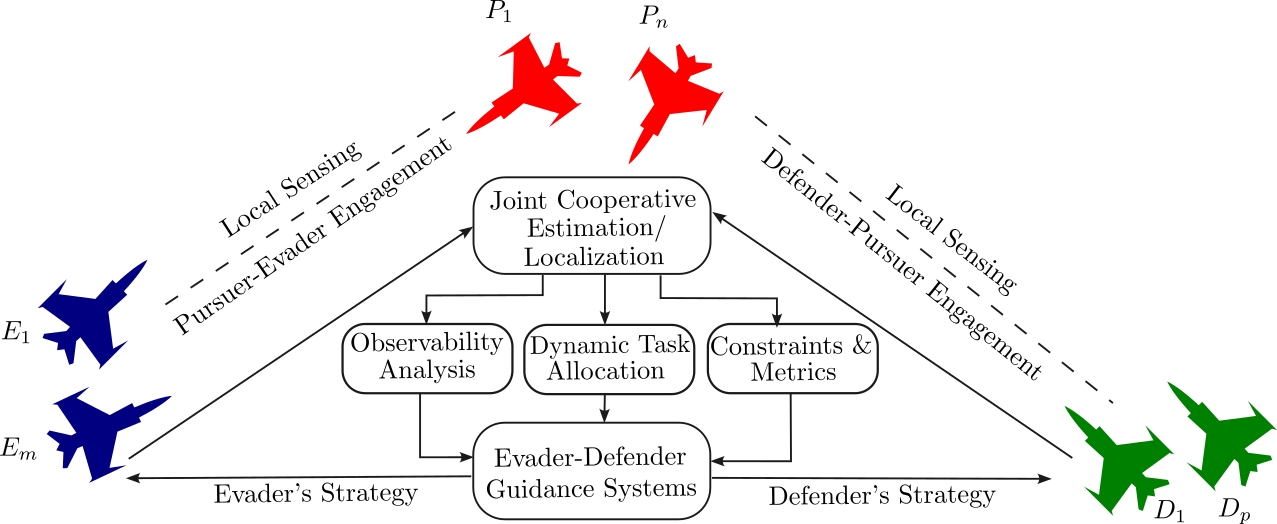
Information-Driven Response in Cooperative Pursuit-Evasion
We develop autonomous decision-making strategies for the agents, enabling them to perform self-localization and track the pursuer using onboard sensors in the absence of radar and communication support. A prevalent assumption in the state-of-the-art is the availability of complete state information, wherein each agent possesses knowledge of the states of all other agents in the game. This assumption is pivotal to the development of strategies rooted in differential games since it allows for the analytical computation of equilibria. The novelty of our approach lies in modeling the dynamic game from the perspective of limited information and developing an information fusion-based joint cooperative estimation and guidance strategies for the evader-defender team.
Selected Publications:
- Shivam Bajpai, Rohith Boyinine, Abhinav Sinha, and Rajnikant Sharma, "Toward Simultaneous Localization and Guidance for Collaborative Combat Aircraft (CCA) Effectiveness", AIAA SciTech Forum, AIAA-2025-1902, pp. 1-14, 2025.