



Aug 2025
Welcome Abhimanyu as a doctoral candidate in the GALACxIS Lab.

Dr. Abhinav Sinha is an Assistant Professor in the Department of Aerospace Engineering and Engineering Mechanics at the University of Cincinnati, and is the director of the Guidance, Autonomy, Learning, and Control for Intelligent Systems (GALACxIS) Lab. He works at the intersection of control theory, artificial intelligence, and dynamical systems. At the core of his research agenda is the development of autonomous multivehicle guidance, navigation, and control strategies, grounded in control theory and motivated by real-world deployment challenges.
Prior to joining the University of Cincinnati, Dr. Abhinav Sinha was a postdoctoral researcher affiliated with the Unmanned Systems Lab at The University of Texas at San Antonio. His prior research experience includes a brief postdoctoral fellowship at the Intelligent Systems & Control Lab, Department of Aerospace Engineering, Indian Institute of Technology Bombay. Dr. Sinha also holds the distinction of completing his Ph.D. degree in Aerospace Engineering from the Indian Institute of Technology Bombay in around two years, setting a record for the fastest completion of a Ph.D. in the Department of Aerospace Engineering and one of the fastest in the institute. He is also a recipient of the prestigious Naik and Rastogi Award for excellence in Ph.D. research. Dr. Sinha is a senior member of IEEE (including Control Systems Society, Aerospace and Electronic Systems Society, and Robotics and Automation Society), a member of IFAC, and is a senior member of AIAA. He also serves as a subcommittee chair for the IEEE TC on Manufacturing, Automation, and Robotic Control.
Addressing terminal constraints on the trajectory of an autonomous vehicle in addition to the primary objective of target interception.
Learn more
The celebrated "the lady, the bandit, and the bodyguard" scenario. Our research offers a different viewpoint on this problem.
Learn more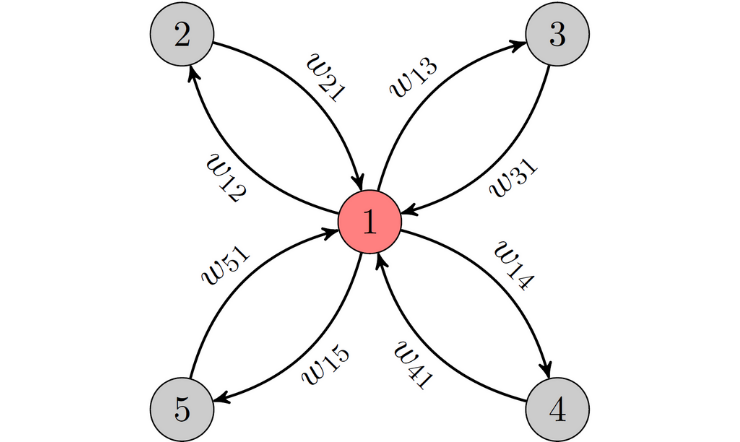
Building safe, resilient and robust networked cyber-physical systems to ensure fully distributed cooperative behavior.
Learn more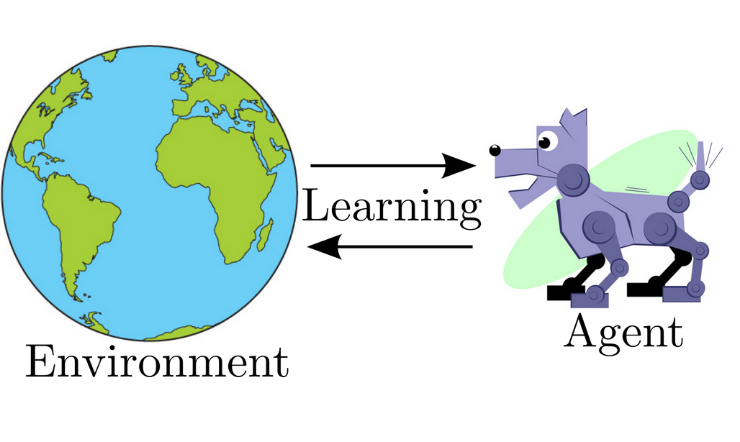
Investigating fundamental aspects in learning and control for an autonomous system, with an emphasis on learning in complex large-scale interconnected systems.
Learn more
Motion planning algorithms that handle uncertainties, adapt to dynamic environments, and maintain consistent performance under adverse conditions.
Learn more
Unleashing the future of airborne mobility and precision manipulation, and redefining the boundaries of aerial possibilities.
Learn more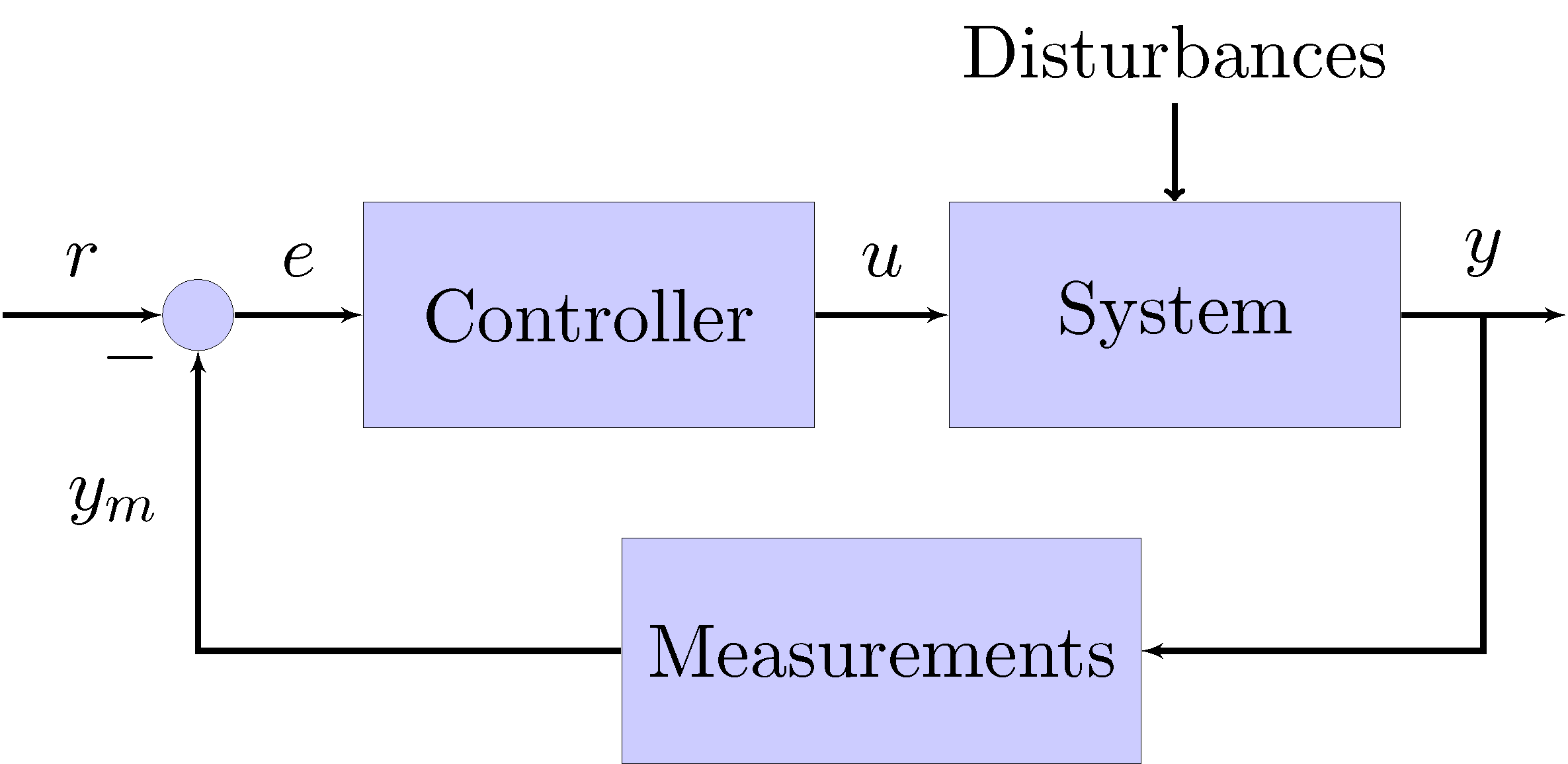
AEEM 4042 (Fall 2024, 2025)
AEEM 2013 (Spring 2024)

AEEM 9074 (Reading Course)

AEEM 9074 (Reading Course)
AEEM 9074 (Reading Course)
AEEM 5015C (Fall 2025)